ابتكر باحثون أستراليون في جامعة أديلايد نظامًا روبوتيًا سربًا مستوحى من سلوك النحل والنمل. كما أظهرت دراسة نشرت في المجلة العلوم الطبيعيةومع ذلك، فإن هذا النهج يمكن أن يجعل التعدين أكثر أمانًا وأرخص وأكثر كفاءة، خاصة في المناطق التي يصعب الوصول إليها حيث تواجه طرق الأتمتة التقليدية قيودًا.
ما اقترحته الطبيعة
تعمل شركات التعدين الحديثة بشكل متزايد على أعماق كبيرة وفي المناطق النائية. ويجري تطوير الأنظمة الآلية بشكل نشط لمثل هذه الظروف، ولكنها تعتمد عادة على جهاز كمبيوتر مركزي. إذا فشلت وحدة التحكم هذه، فقد يتوقف العمل.
قرر فريق من العلماء البحث عن حل في الطبيعة. النمل والنحل قادران على تنسيق تصرفات آلاف الأفراد دون مركز قيادة واحد. يقوم كل مشارك بمهام بسيطة نسبيًا، لكنهم معًا يشكلون نظامًا فعالاً بشكل مدهش.
وقد حاول الباحثون نقل هذا المبدأ إلى الروبوتات.
ثلاث استراتيجيات لمنجم واحد

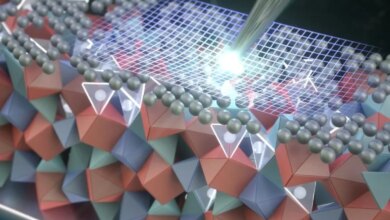
الصورة: العلوم الطبيعية
تخطيط تجريبي لطرق المحاجر مع طرق الشاحنات القلابة ومواقع تعدين الخام المستخدمة لاختبار سرب من الروبوتات.
في التجربة، استخدمنا روبوتات Zumo 2040 الصغيرة وموقع اختبار معملي يحاكي ظروف الألغام.
قارن العلماء بين ثلاثة خيارات للعمل. في الحالة الأولى، عثرت الروبوتات ببساطة على الخام وسلمته على الفور إلى القاعدة. واتخذت الثانية نهجا مستوحى من النمل، حيث تتقاسم الآلات المختلفة المسؤوليات فيما بينها. كان البعض منهمكًا في البحث عن الموارد، والبعض الآخر في نقلها.
الاستراتيجية الثالثة نسخت سلوك النحل. أولاً، استكشفت الروبوتات المنطقة وأنشأت خريطة للمنطقة، وتذكرت موقع الموارد، وعندها فقط بدأت في جمعها ونقلها.
علاوة على ذلك، فإن النظام بأكمله يعمل بدون كمبيوتر تحكم مركزي. يتخذ كل روبوت قراراته بشكل مستقل وينسق الإجراءات مع الأعضاء الآخرين في السرب.
هذا الأسلوب يجعل النظام متسامحًا مع الأخطاء. وحتى لو تعطلت بعض الأجهزة، فإن الباقي يستمر في أداء المهمة.
تبين أن النحل هو أفضل المعلمين
تبين أن استراتيجية “النحل” هي الأكثر نجاحًا.
سمحت الدراسة الأولية للمنطقة للروبوتات بتقليل عدد الحركات غير الضرورية بشكل كبير. ونتيجة لذلك، تم تقليل المسافة المقطوعة بنسبة 80% تقريبًا، وانخفض استهلاك الطاقة إلى النصف تقريبًا، وأصبح تسليم الخام أسرع بنسبة تصل إلى 60% مقارنة بعملية خط الأساس.
كما أدى النهج المستوحى من النمل إلى تحسين الأداء، لكنه كان أقل شأنا من نهج رسم الخرائط المسبق.
وقال المؤلف الرئيسي الدكتور جوفين تان: “لقد طورت الحشرات الاجتماعية طرقًا فعالة جدًا لحل المشكلات معًا”. “من خلال تطبيق هذه الأفكار على الروبوتات، يمكننا إنشاء أنظمة أكثر كفاءة وقدرة على التكيف وموثوقية لصناعات مثل التعدين.”
لقد تجاوزت الاختبارات نموذج الكمبيوتر

الصورة: العلوم الطبيعية
روبوت زومو 2040 من الأعلى (أ)، ومن الجانب (ب) ومن الأسفل (ج). يتم عرض أجهزة الاستشعار المستخدمة للملاحة ومحرك المسار.
يؤكد المؤلفون أن العمل لم يقتصر على عمليات المحاكاة. تم اختبار جميع الخوارزميات على روبوتات حقيقية في ظروف معملية قريبة من التعدين.
ووفقا لقائد المشروع الدكتور نوني ملكوميان، فإن هذا يدل على أن الأفكار المستمدة من الطبيعة الحية يمكن تحويلها بنجاح إلى تقنيات عملية.
وقال الباحث: “لقد أمضت الطبيعة ملايين السنين في تطوير طرق فعالة لتفاعل مجموعات الحيوانات. ومن خلال دراسة هذه الأنظمة، يمكننا تطوير تقنيات جديدة أكثر مرونة وموثوقية وكفاءة”.
آفاق تحت الأرض وفي الفضاء
قبل تطبيق التكنولوجيا في المناجم الحقيقية، يجب حل عدد من المشاكل. ويحتاج المهندسون إلى تحسين موثوقية أجهزة الاستشعار، وزيادة عمر البطارية، وتكييف الروبوتات مع الظروف تحت الأرض التي لا يمكن التنبؤ بها.
ومع ذلك، فإن الفرص المحتملة تبدو واسعة جدًا. يمكن لسرب من الروبوتات العمل في المناطق الخطرة حيث يشكل الوجود البشري خطرًا متزايدًا. بالإضافة إلى ذلك، تعتبر هذه الأنظمة إحدى الأدوات الممكنة لاستخراج الموارد المستقبلية على القمر أو الكويكبات.
وشدد ملكوميان على أن “روبوتات السرب لم تعد مجرد فكرة نظرية”. – يمكن إنشاء مثل هذه الأنظمة واختبارها واستخدامها في ظروف حقيقية. وفي المستقبل، لديهم القدرة على تغيير الطريقة التي يتم بها استكشاف الموارد واستخراجها ونقلها.
تنويه من موقع “beiruttime-lb.com”:
تم جلب هذا المحتوى بشكل آلي من المصدر:
naukatv.ru
بتاريخ: 2026-06-25 22:27:00.
الآراء والمعلومات الواردة في هذا المقال لا تعبر بالضرورة عن رأي موقع “beiruttime-lb.com”، والمسؤولية الكاملة تقع على عاتق المصدر الأصلي.
ملاحظة: قد يتم استخدام الترجمة الآلية في بعض الأحيان لتوفير هذا المحتوى.